Publications
Publications by categories in reversed chronological order. Generated by jekyll-scholar.
Peer-reviewed journal papers
2023

2022



2021



2020



2019


2018



2017


2016

2015


2014

2013

Preprints
2023

2022

2017

Book chapters
2014

Peer-reviewed international conference papers
2023
2022
2019
2018
2016
2015
2014
2013
2012
2011


2010
- Position and orientation control of robot manipulators using dual quaternion feedbackIn 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems , Oct 2010
2009

Peer-reviewed national conference papers
2020

2018


2017
2016
2015
-
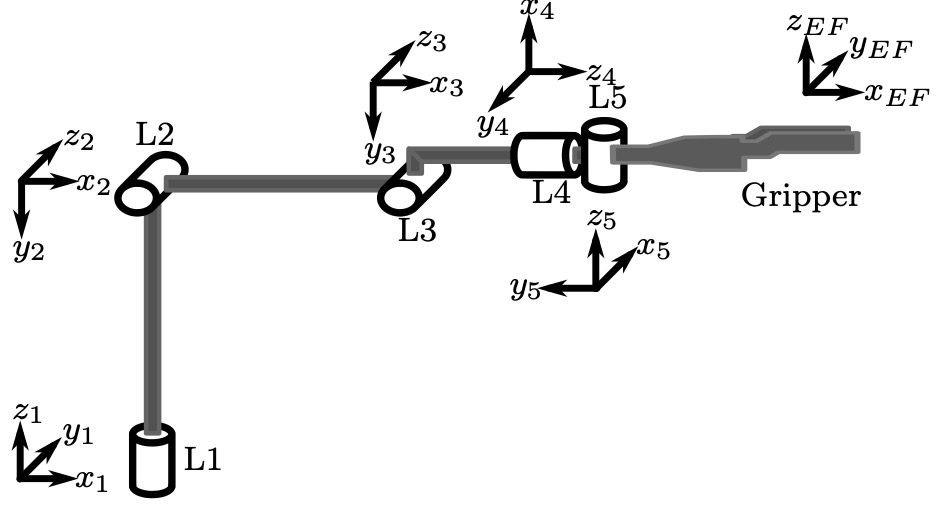
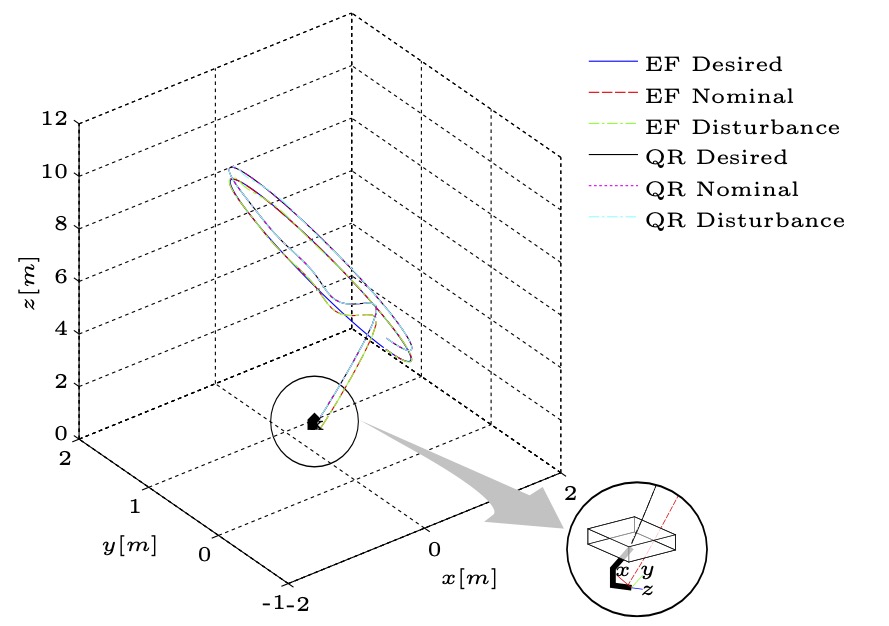 Whole-Body Modeling and Control of an Unmanned Aerial ManipulatorIn XII Simpósio Brasileiro de Automação Inteligente (SBAI) , Oct 2015
Whole-Body Modeling and Control of an Unmanned Aerial ManipulatorIn XII Simpósio Brasileiro de Automação Inteligente (SBAI) , Oct 2015



2014
-
 Modelagem e Controle de Corpo Completo Usando Quatérnios Duais para um Manipulador MóvelIn Anais do XX Congresso Brasileiro de Automática , Oct 2014
Modelagem e Controle de Corpo Completo Usando Quatérnios Duais para um Manipulador MóvelIn Anais do XX Congresso Brasileiro de Automática , Oct 2014 -
 Descrição Geométrica, Cinemática e de Esforços para Tarefas de Manipulação Usando Quatérnios DuaisIn Congresso Brasileiro de Automática , Oct 2014
Descrição Geométrica, Cinemática e de Esforços para Tarefas de Manipulação Usando Quatérnios DuaisIn Congresso Brasileiro de Automática , Oct 2014 -
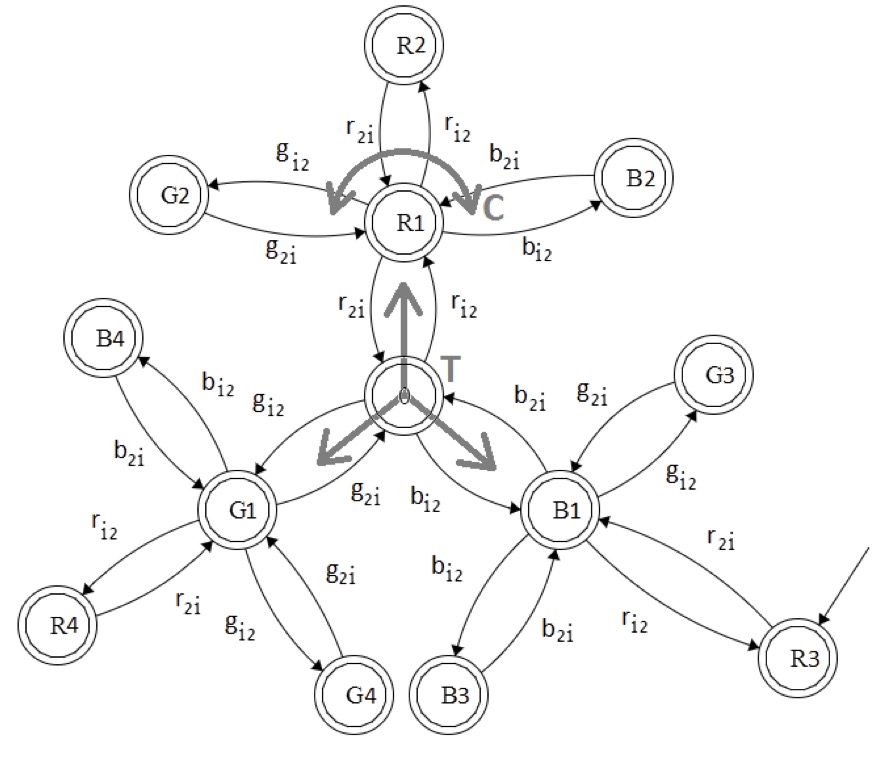 Teoria de Controle Supervisório e Controle Dirigido Ótimo: Solução de um Problema de SequenciamentoIn Congresso Brasileiro de Automática , Oct 2014
Teoria de Controle Supervisório e Controle Dirigido Ótimo: Solução de um Problema de SequenciamentoIn Congresso Brasileiro de Automática , Oct 2014



2013
-
 Assistance Task Using a Manipulator Robot and User Kinematics FeedbackIn Anais do Simpósio Brasileiro de Automação Inteligente , Oct 2013
Assistance Task Using a Manipulator Robot and User Kinematics FeedbackIn Anais do Simpósio Brasileiro de Automação Inteligente , Oct 2013 -
 Design Of Singularity-robust and Task-priority Kinematic Controllers in the Unit Dual Quaternion SpaceIn Anais do Simpósio Brasileiro de Automação Inteligente , Oct 2013
Design Of Singularity-robust and Task-priority Kinematic Controllers in the Unit Dual Quaternion SpaceIn Anais do Simpósio Brasileiro de Automação Inteligente , Oct 2013


2012
-
 Manipulação Cooperativa Descentralizada Usando o Espaço Dual de CooperaçãoIn XIX Congresso Brasileiro de Automática , Oct 2012
Manipulação Cooperativa Descentralizada Usando o Espaço Dual de CooperaçãoIn XIX Congresso Brasileiro de Automática , Oct 2012

2007
-
 Planejamento de caminho usando BI-ARW melhorado e mapa de rotasIn Simpósio Brasileiro de Automação Inteligente , Oct 2007
Planejamento de caminho usando BI-ARW melhorado e mapa de rotasIn Simpósio Brasileiro de Automação Inteligente , Oct 2007

2006
-
 Um método de planejamento de trajetória para robôs móveis através de passeios aleatórios adaptativos e mapa de rotasIn XVI Congresso Brasileiro de Automática , Oct 2006
Um método de planejamento de trajetória para robôs móveis através de passeios aleatórios adaptativos e mapa de rotasIn XVI Congresso Brasileiro de Automática , Oct 2006

2005
-
 Planejamento de trajetória para o robô OMNI utilizando o algoritmo mapa de rotas probabilísticoIn VII Simpósio Brasileiro de Automação Inteligente / II IEEE Latin-American Robotics Symposium , Oct 2005
Planejamento de trajetória para o robô OMNI utilizando o algoritmo mapa de rotas probabilísticoIn VII Simpósio Brasileiro de Automação Inteligente / II IEEE Latin-American Robotics Symposium , Oct 2005
