publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
Journal Articles
2023
2022
2021
2020
2019
2018
2017
- The Cross-Motion Invariant Group and Its Application to KinematicsIMA Journal of Mathematical Control and Information, Dec 2017
2016
2015
2014
2013
Conference Papers
2026
- Planning and Control of Mobile Manipulators for Inspection of Clustered EnvironmentsIn 7th UK Robot Manipulation Workshop, 2026
- Object-Reconstruction-Aware Whole-body Control of Mobile ManipulatorsIn 7th UK Robot Manipulation Workshop, 2026
- Underwater Whole-body Control Using Constrained Feedback LinearisationIn 7th UK Robot Manipulation Workshop, 2026
2025
2024
- A New Hybrid Teleoperation Control Scheme for Holonomic Mobile Manipulator Robots Using a Ground-based Haptic DeviceIn 25th Annual Conference Towards Autonomous Robotic System, 2024
- Control Strategies for the Task Definition of Constrained Bimanual ManipulationIn 5th UK Robot Manipulation Workshop, 2024
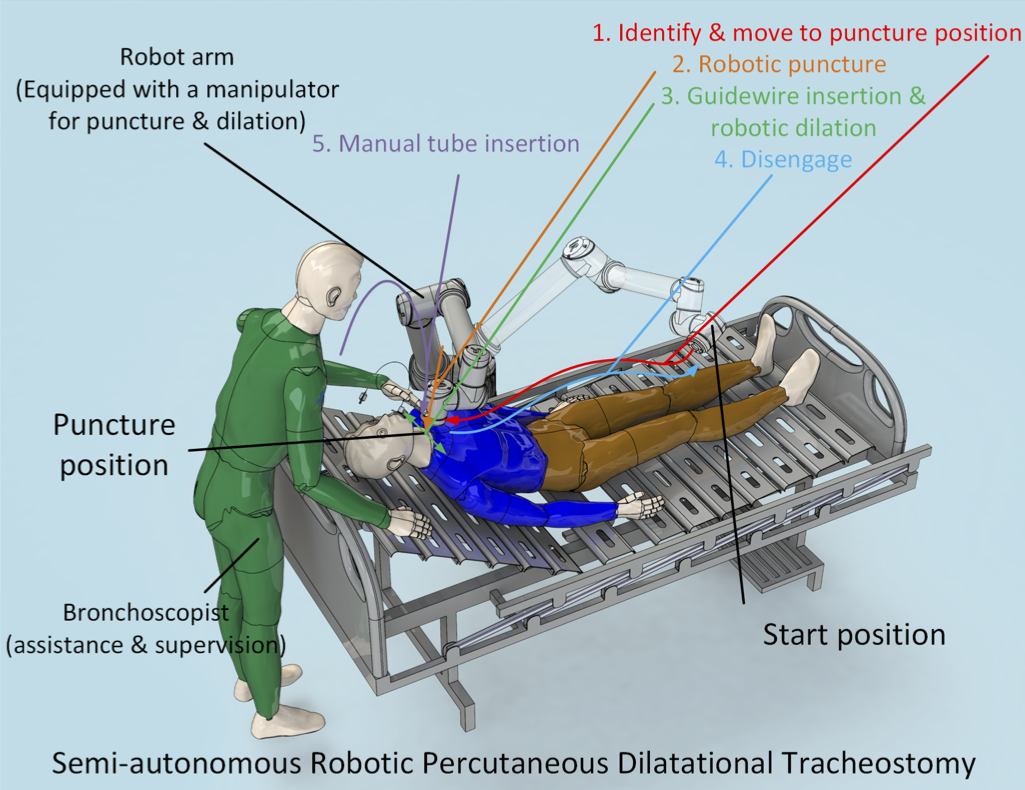
- Automated Robotic Needle Puncture for Percutaneous Dilatational TracheostomyIn 5th UK Robot Manipulation Workshop, 2024
2023
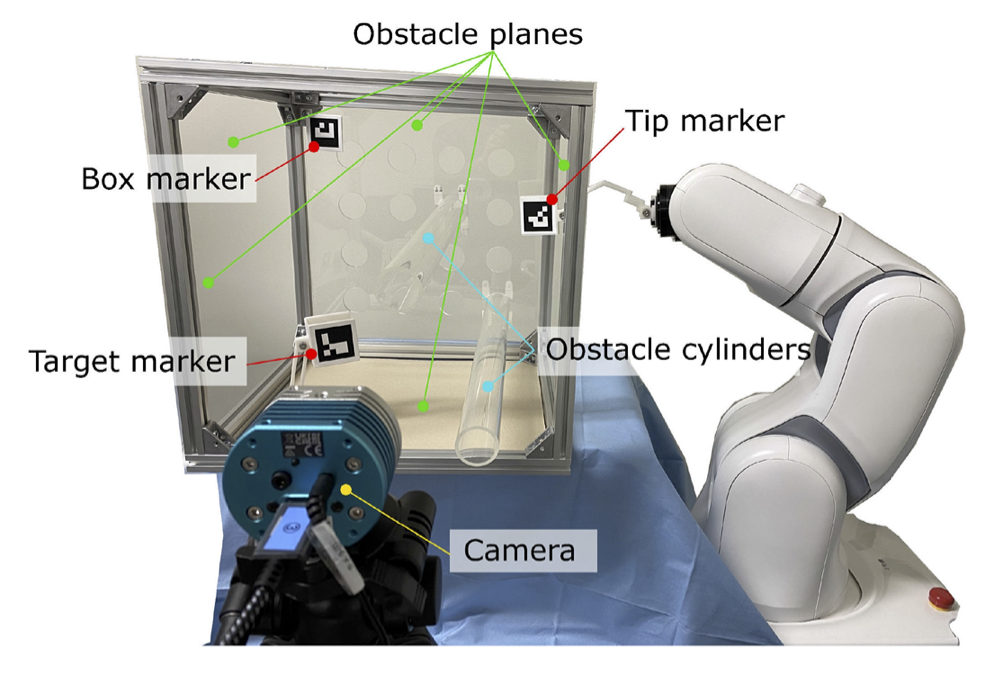
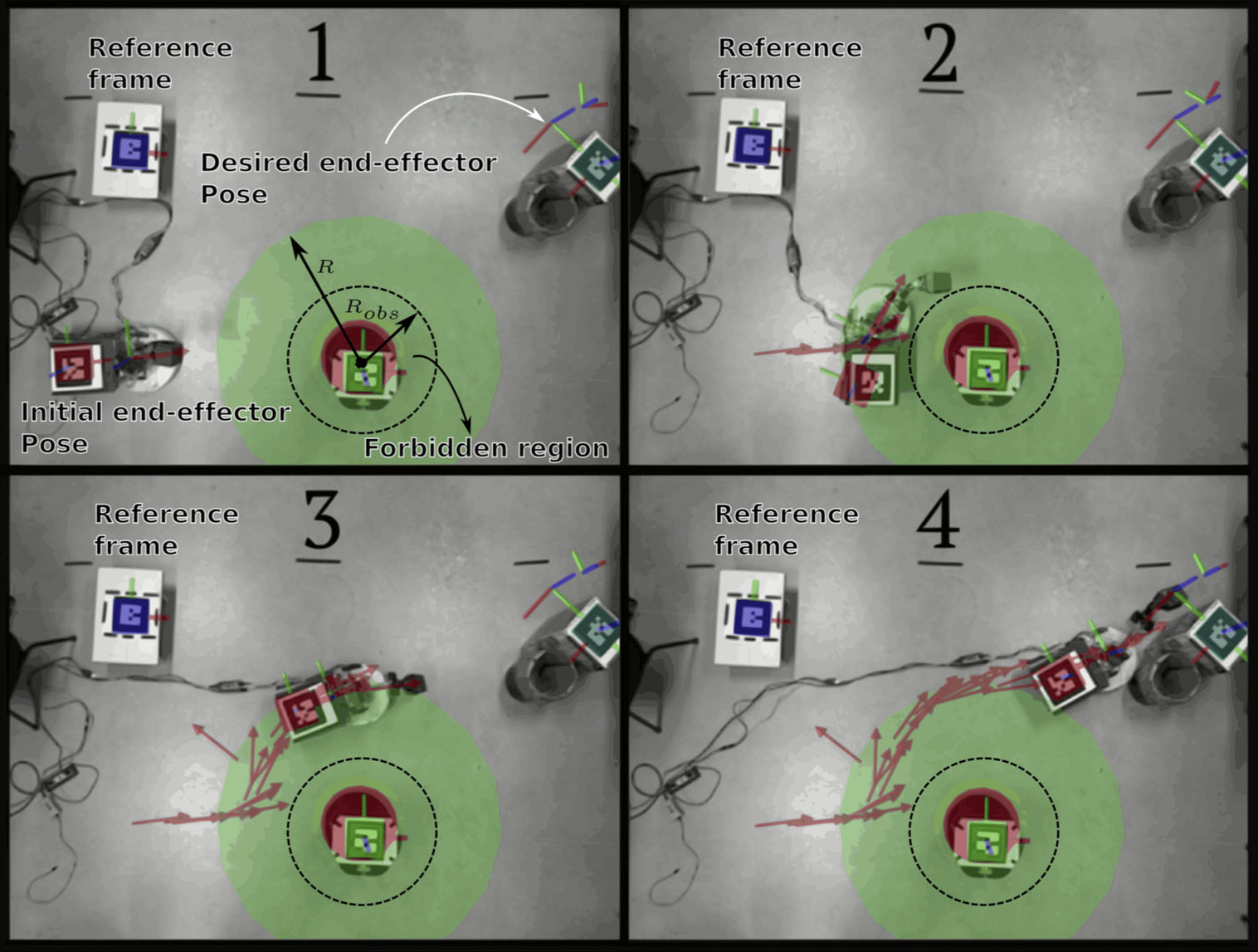
- Maintaining Visibility of Dynamic Objects in Cluttered Environments Using Mobile Manipulators and Vector Field InequalitiesIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2023
- Receding Horizon Contact Planning for Agile Motions in Hexapod RobotsIn ICRA 2023 Workshop on Agile Movements: Animal Behavior, Biomechanics, and Robot Devices, 2023
- Receding Horizon Contact Planning for Advanced Motions in Hexapod RobotsIn Proceedings of the 24th Annual TAROS 2023 Conference - Extended Abstracts, 2023
- Task Planning and Motion Control with Temporal Logic SpecificationsIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2023
- Clinical Perspective of Developing Robotic Systems for Assisting Percutaneous TracheostomyIn 28th Congress of the European Society of Biomechanics, July 9-12, 2023, Maastricht, the Netherlands, Apr 2023
2022
- Set-Point Control for a Ground-based Reconfigurable RobotIn 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2022There is a typo in the value of alpha. The correct is the one in the figure; that is, alpha is +1 when the CoM is above the horizontal axis and -1 otherwise. Remember to put an errata on my Webpage.
2020
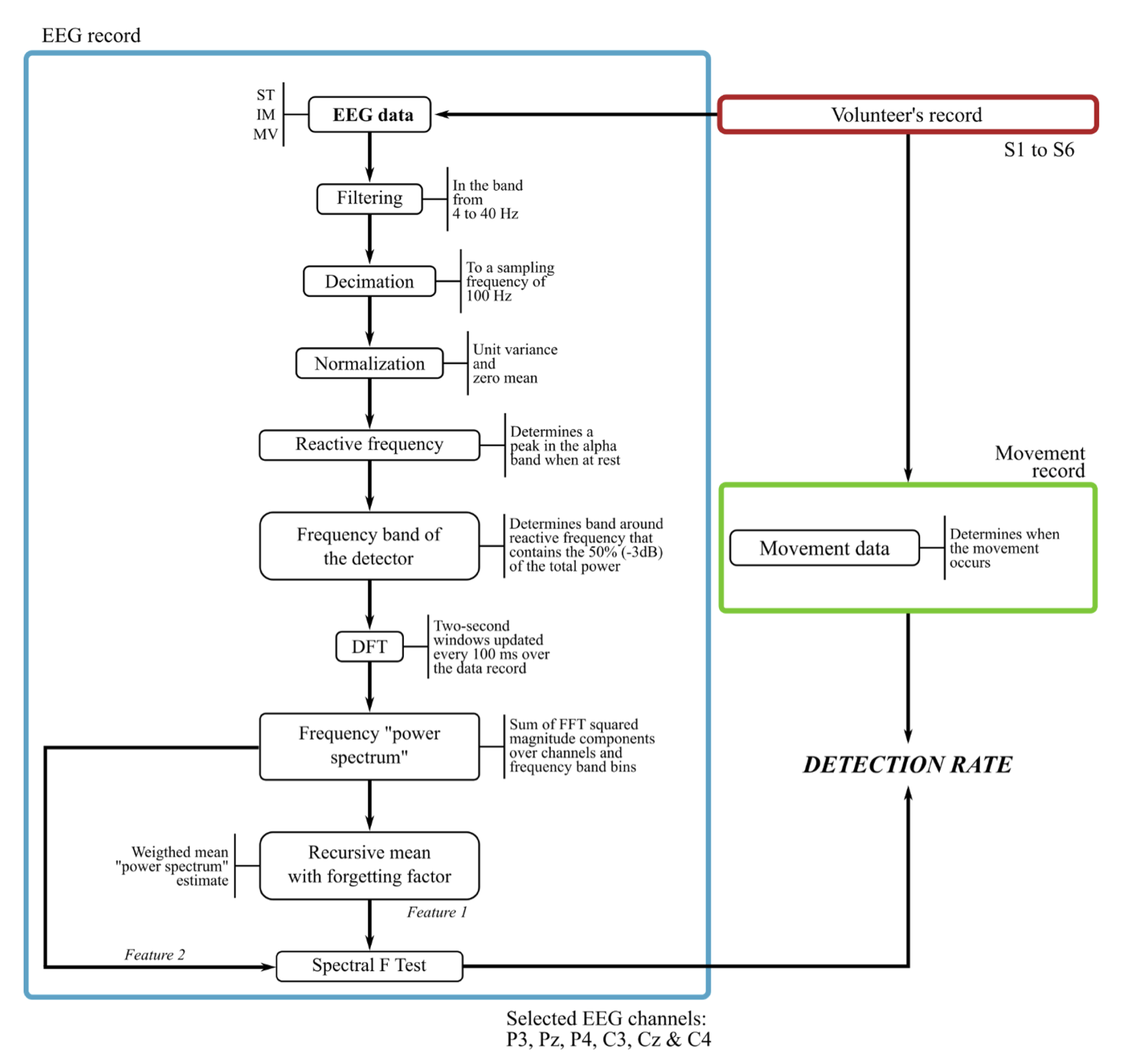
- Development of Human-Robot Communication Technologies for Future Interaction ExperimentsIn 2020 Latin American Robotics Symposium (LARS), 2020 Brazilian Symposium on Robotics (SBR) and 2020 Workshop on Robotics in Education (WRE), Nov 2020
- Biped Walking Control Based on Quadratic Programming and Differential InequalitiesIn Anais Do Congresso Brasileiro de Automática 2020, Dec 2020
- Manipulation Task Planning with Constrained Kinematic ControllerIn Anais Do Congresso Brasileiro de Automática 2020, Dec 2020
2019
- Distributed Coverage of Boundaries for Multi-robot Systems Using Dual Quaternion AlgebraIn Workshop on Applications of Dual Quaternion Algebra to Robotics, 2019
- Human Gesture Recognition Using Dual Quaternion AlgebraIn Workshop on Applications of Dual Quaternion Algebra to Robotics, 2019
- An Adaptive Controller with Guarantee of Better Conditioning of the Robot Manipulator Joint-Space Inertia MatrixIn 2019 19th International Conference on Advanced Robotics (ICAR), Dec 2019
- Task-Space Impedance Controller Using Dual Quaternion LogarithmIn Workshop on Applications of Dual Quaternion Algebra to Robotics, 2019
- Manipulation Task Planning and Motion Control Using Task RelaxationsIn Workshop on Applications of Dual Quaternion Algebra to Robotics, 2019
- Bimanual Mobile Manipulation Using the Cooperative Dual Task-Space Framework and Vector Fields InequalitiesIn Workshop on Applications of Dual Quaternion Algebra to Robotics, 2019
- Wrench Control Based on Dual Quaternion AlgebraIn Workshop on Applications of Dual Quaternion Algebra to Robotics, 2019
- Constraint-Based Gait Control Using Differential InequalitiesIn Workshop on Applications of Dual Quaternion Algebra to Robotics, 2019
2018
- CONVERGÊNCIA E COBERTURA DE CURVAS POR SISTEMAS MULTI-ROBÔSIn Anais Do XXII Congresso Brasileiro de Automática, 2018
- Design of an Adaptive Controller to Improve the Condition Number of the Inertia Matrix of Serial ManipulatorsIn Anais Do XXII Congresso Brasileiro de Automática, 2018
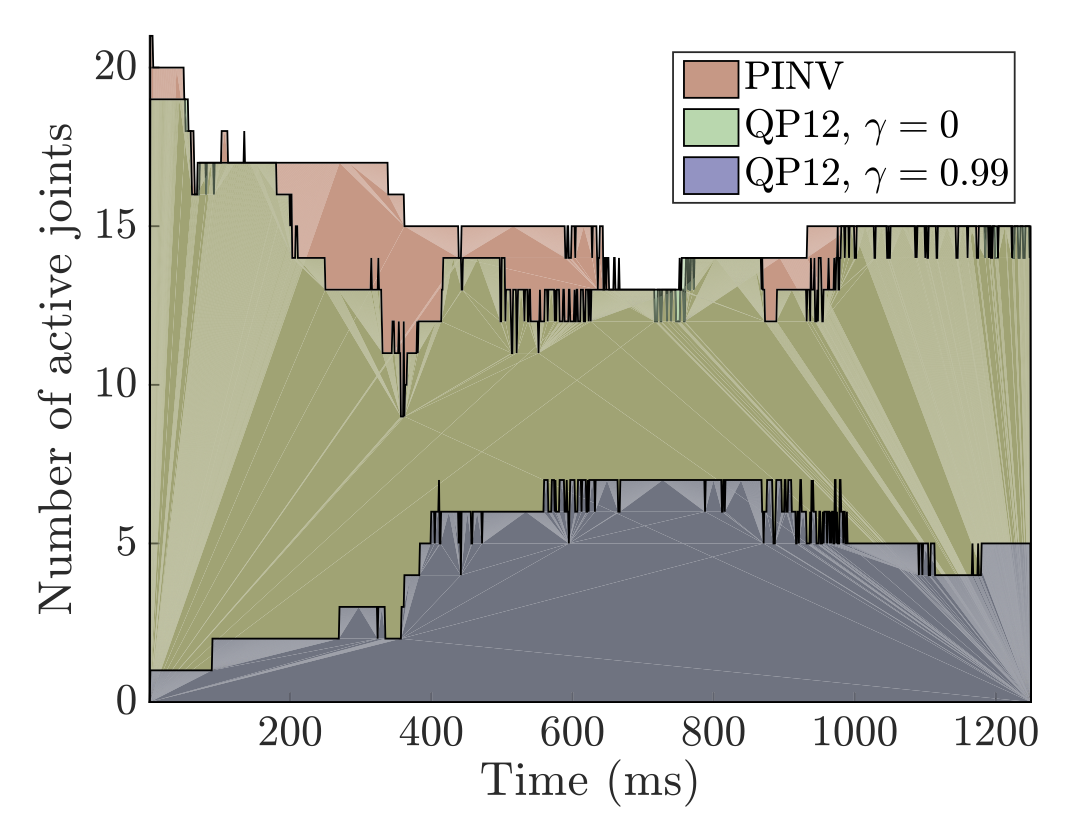
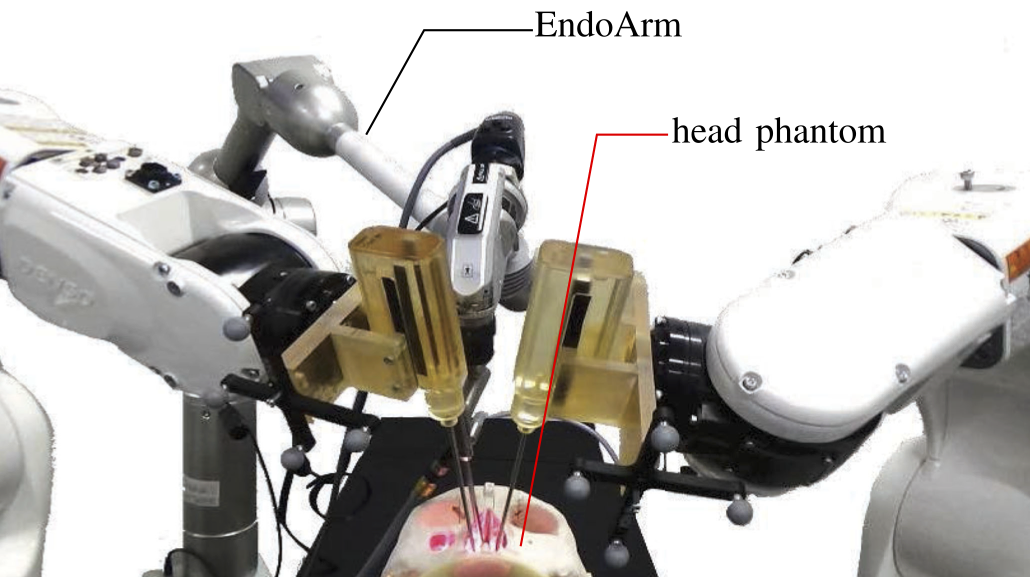
- Active Constraints Using Vector Field Inequalities for Surgical RobotsIn 2018 IEEE International Conference on Robotics and Automation (ICRA), May 2018
2017
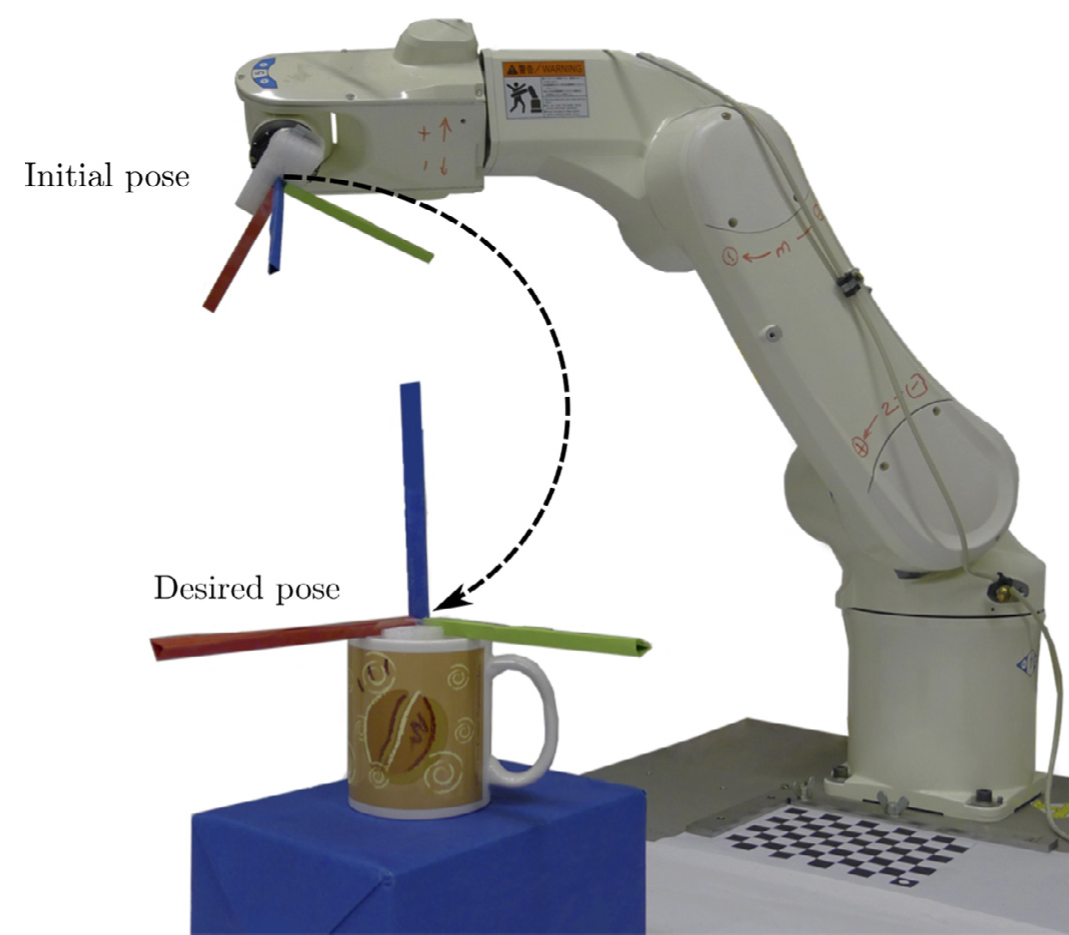
- External Hybrid Force/Pose Controller for Manipulator Robots Using Dual Quaternion AlgebraIn 2017 Latin American Robotics Symposium (LARS) and 2017 Brazilian Symposium on Robotics (SBR), Nov 2017
2016
- Whole-Body Modeling and Hierarchical Control of a Humanoid Robot Based on Dual Quaternion AlgebraIn 2016 XIII Latin American Robotics Symposium and IV Brazilian Robotics Symposium (LARS/SBR), Oct 2016
- Robust Whole-Body Control of an Unmanned Aerial ManipulatorIn 2016 European Control Conference (ECC), Jun 2016
- Formation Backstepping Control Based on the Cooperative Dual Task-Space Framework: A Case Study on Unmanned Aerial VehiclesIn 2016 XIII Latin American Robotics Symposium and IV Brazilian Robotics Symposium (LARS/SBR), Oct 2016
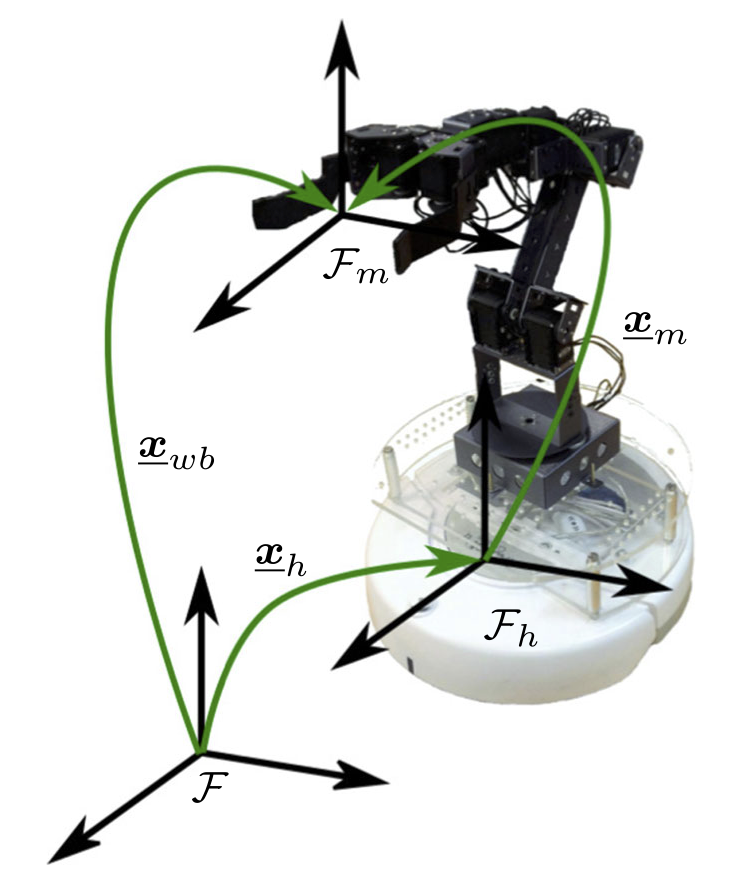
- Whole-Body Control of a Mobile Manipulator Using Feedback Linearization Based on Dual QuaternionsIn 2016 XIII Latin American Robotics Symposium and IV Brazilian Robotics Symposium (LARS/SBR), Oct 2016
2015
- Consenso Utilizando a Álgebra de Quatérnios Duais Em Sistemas Compostos Por Manipuladores MóveisIn XII Simpósio Brasileiro de Automação Inteligente (SBAI), 2015
- A New Algebraic Approach for the Description of Robotic Manipulation TasksIn 2015 IEEE International Conference on Robotics and Automation (ICRA), May 2015
- Whole-Body Modeling and Control of an Unmanned Aerial ManipulatorIn XII Simpósio Brasileiro de Automação Inteligente (SBAI), 2015
- Balance Control of a Humanoid Robot Based on the Cooperative Dual Task-Space FrameworkIn XII Simpósio Brasileiro de Automação Inteligente (SBAI), 2015
2014
- Teoria de Controle Supervisório e Controle Dirigido Ótimo: Solução de Um Problema de SequenciamentoIn Congresso Brasileiro de Automática, 2014
- Switching Strategy for Flexible Task Execution Using the Cooperative Dual Task-Space FrameworkIn 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Sep 2014
- Descrição Geométrica, Cinemática e de Esforços Para Tarefas de Manipulação Usando Quatérnios DuaisIn Congresso Brasileiro de Automática, 2014
- Modelagem e Controle de Corpo Completo Usando Quatérnios Duais Para Um Manipulador MóvelIn Anais Do XX Congresso Brasileiro de Automática, 2014
2013
- Assistance Task Using a Manipulator Robot and User Kinematics FeedbackIn Anais Do Simpósio Brasileiro de Automação Inteligente, 2013
- Design Of Singularity-robust and Task-priority Kinematic Controllers in the Unit Dual Quaternion SpaceIn Anais Do Simpósio Brasileiro de Automação Inteligente, 2013
2012
- Manipulação Cooperativa Descentralizada Usando o Espaço Dual de CooperaçãoIn XIX Congresso Brasileiro de Automática, 2012
2011
- Interactive Manipulation between a Human and a Humanoid: When Robots Control Human Arm MotionIn 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011
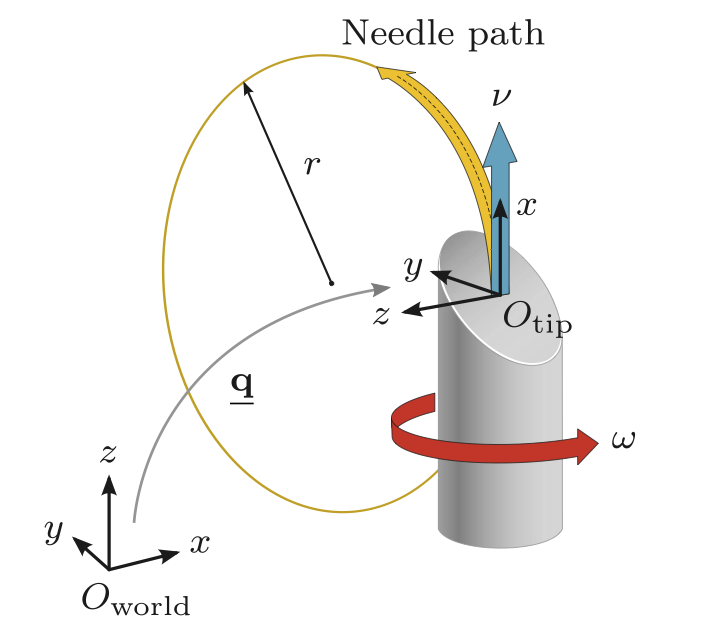
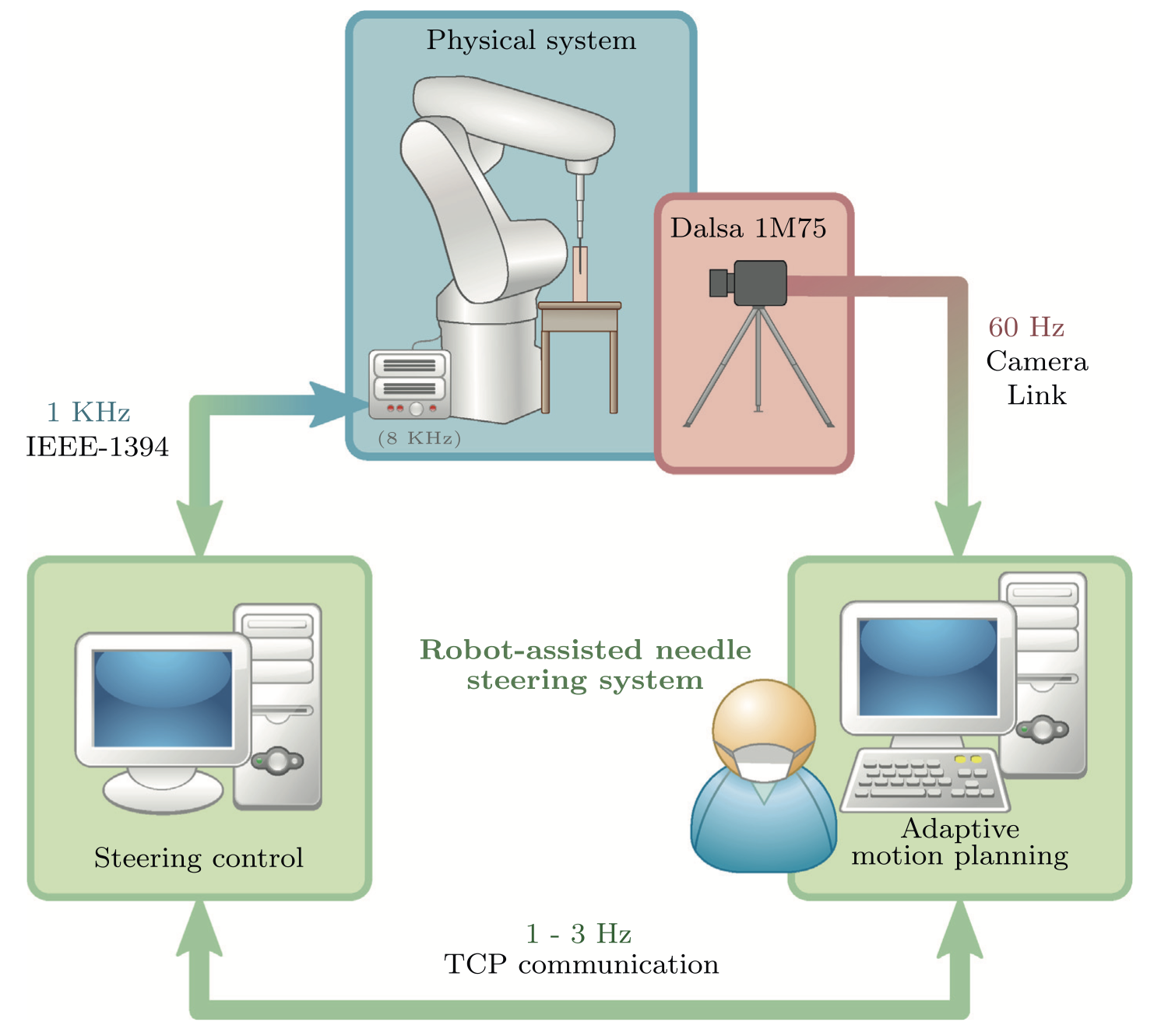
- Path Planning for Steerable Needles Using Duty-CyclingIn CARS 2011 Computer Assisted Radiology and Surgery, 2011
- Adaptive Path Planning for Steerable Needles Using Duty-CyclingIn 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011
2010
- Dual Position Control Strategies Using the Cooperative Dual Task-Space FrameworkIn 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2010
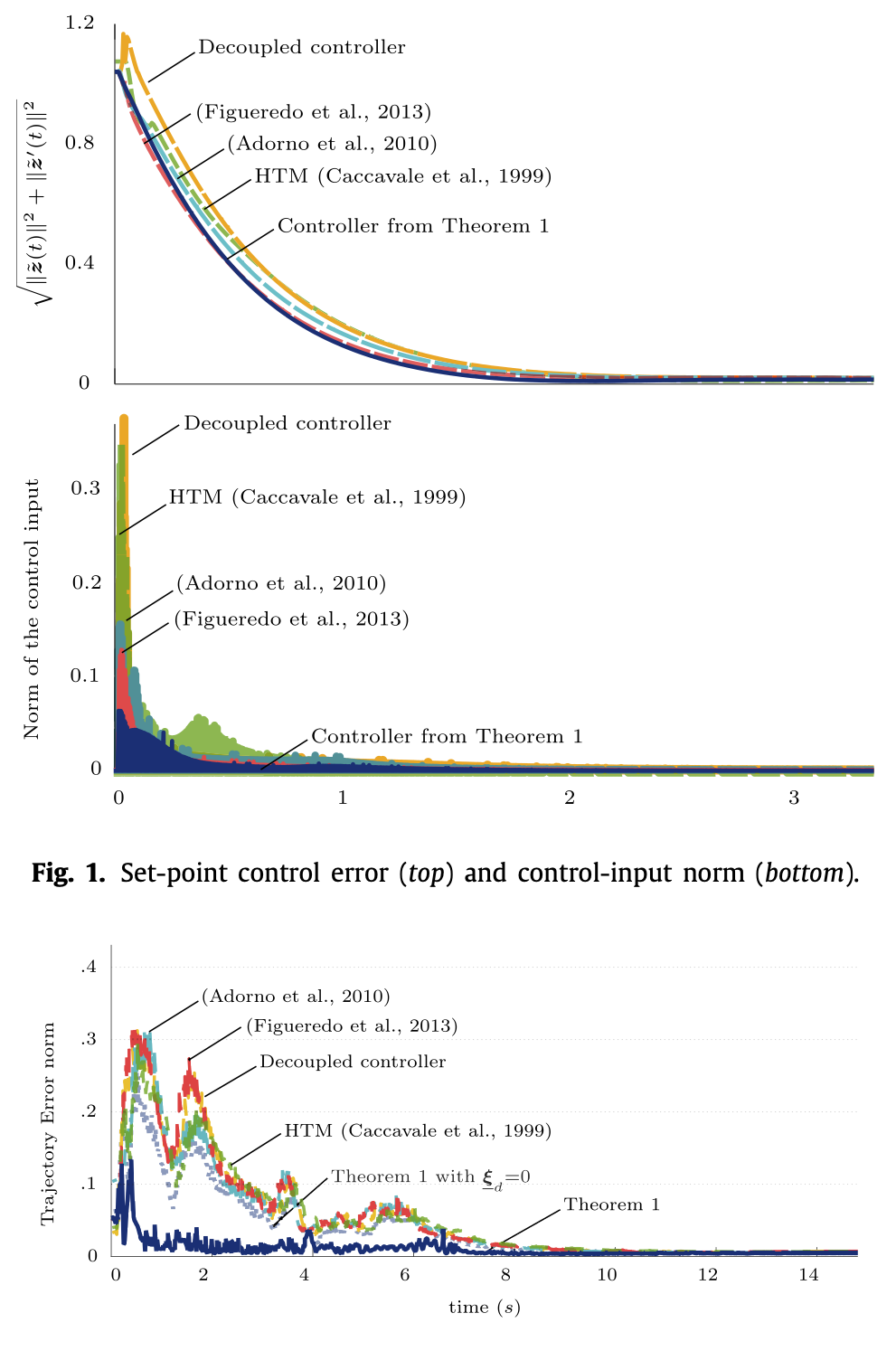
- Position and Orientation Control of Robot Manipulators Using Dual Quaternion FeedbackIn 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2010
2009
- iARW: An Incremental Path Planner Algorithm Based on Adaptive Random WalksIn The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2009
2007
- Planejamento de Caminho Usando BI-ARW Melhorado e Mapa de RotasIn Simpósio Brasileiro de Automação Inteligente, 2007
2006
- Um Método de Planejamento de Trajetória Para Robôs Móveis Através de Passeios Aleatórios Adaptativos e Mapa de RotasIn XVI Congresso Brasileiro de Automática, 2006
2005
- Planejamento de Trajetória Para o Robô OMNI Utilizando o Algoritmo Mapa de Rotas ProbabilísticoIn VII Simpósio Brasileiro de Automação Inteligente / II IEEE Latin-American Robotics Symposium, 2005
Book Preprints
2017
- Robot Kinematic Modeling and Control Based on Dual Quaternion Algebra – Part I: Fundamentals2017
Preprints
2026
- Object-Reconstruction-Aware Whole-body Control of Mobile ManipulatorsMar 202619 pages, 17 figures, 5 tables. Under Review for the IEEE Transactions on Robotics (T-RO)
2025
2023
2022
- The IncompleteGuide to Academic Writing in Robotics Research2022
Theses
2011
- Two-Arm Manipulation: From Manipulators to Enhanced Human-Robot Collaboration [Contribution à La Manipulation à Deux Bras : Des Manipulateurs à La Collaboration Homme-Robot]Université Montpellier 2, 2011
2008
- Planejamento probabilístico de rotas no espaço de configuração e sua aplicação em robótica móvel2008